图像类型转换
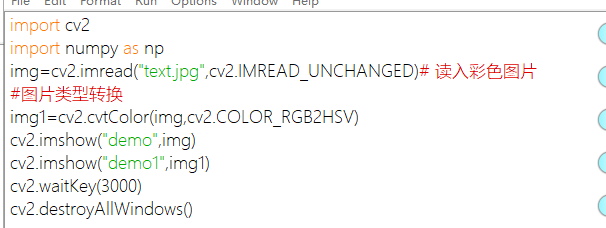
cvtColor:颜色空间转换函数
cv2.cvtColor()支持多种颜色空间之间的转换,其
需要注意的是cvtColor()函数不能直接将RGB图像转换为二值图像(Binary Image),需要借助threshold()函数
HSV中:H为色彩,取值范围是[0,179],S为饱和度,取值范围是[0,255],V是亮度,取值范围是[0,255]。
支持的转换类型和转换码如下:
1、RGB和BGR(opencv默认的彩色图像的颜色空间是BGR)颜色空间的转换
COLOR_BGR2RGB
COLOR_RGB2BGR
COLOR_RGBA2BGRA
COLOR_BGRA2RGBA
2、向RGB和BGR图像中增添alpha通道
COLOR_RGB2RGBA
COLOR_BGR2BGRA
3、从RGB和BGR图像中去除alpha通道
COLOR_RGBA2RGB
COLOR_BGRA2BGR
4、从RBG和BGR颜色空间转换到灰度空间
COLOR_RGB2GRAY
COLOR_BGR2GRAY
COLOR_RGBA2GRAY
COLOR_BGRA2GRAY
5、从灰度空间转换到RGB和BGR颜色空间
COLOR_GRAY2RGB
COLOR_GRAY2BGR
COLOR_GRAY2RGBA
COLOR_GRAY2BGRA
6、RGB和BGR颜色空间与BGR565颜色空间之间的转换
COLOR_RGB2BGR565
COLOR_BGR2BGR565
COLOR_BGR5652RGB
COLOR_BGR5652BGR
COLOR_RGBA2BGR565
COLOR_BGRA2BGR565
COLOR_BGR5652RGBA
COLOR_BGR5652BGRA
7、灰度空间域BGR565之间的转换
COLOR_GRAY2BGR555
COLOR_BGR5552GRAY
8、RGB和BGR颜色空间与CIE XYZ之间的转换
COLOR_RGB2XYZ
COLOR_BGR2XYZ
COLOR_XYZ2RGB
COLOR_XYZ2BGR
9、RGB和BGR颜色空间与uma色度(YCrCb空间)之间的转换
COLOR_RGB2YCrCb
COLOR_BGR2YCrCb
COLOR_YCrCb2RGB
COLOR_YCrCb2BGR
10、RGB和BGR颜色空间与HSV颜色空间之间的相互转换
COLOR_RGB2HSV
COLOR_BGR2HSV
COLOR_HSV2RGB
COLOR_HSV2BGR
11、RGB和BGR颜色空间与HLS颜色空间之间的相互转换
COLOR_RGB2HLS
COLOR_BGR2HLS
COLOR_HLS2RGB
COLOR_HLS2BGR
12、RGB和BGR颜色空间与CIE Lab颜色空间之间的相互转换
COLOR_RGB2Lab
COLOR_BGR2Lab
COLOR_Lab2RGB
COLOR_Lab2BGR
13、RGB和BGR颜色空间与CIE Luv颜色空间之间的相互转换
COLOR_RGB2Luv
COLOR_BGR2Luv
COLOR_Luv2RGB
COLOR_Luv2BGR
14、Bayer格式(raw data)向RGB或BGR颜色空间的转换
COLOR_BayerBG2RGB
COLOR_BayerGB2RGB
COLOR_BayerRG2RGB
COLOR_BayerGR2RGB
COLOR_BayerBG2BGR
COLOR_BayerGB2BGR
COLOR_BayerRG2BGR
COLOR_BayerGR2BGR
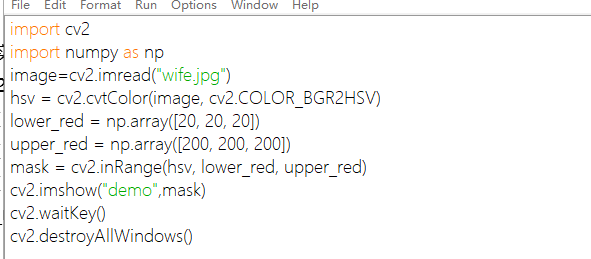
inrange:
实现二值化功能
image=cv2.inrance(hsv,lower_red,upper_red)
第一个参数:hsv指的是原图
第二个参数:lower_red指的是图像中低于这个lower_red的值,图像值变为0
第三个参数:upper_red指的是图像中高于这个upper_red的值,图像值变为0
而在lower_red~upper_red之间的值变成255
图像中的与、或、异或、非操作
opencv中的bitwise_not,bitwise_xor,bitwise_or,bitwise_and的使用方法与效果。
bitwise_and是对二进制数据进行“与”操作,即对图像(灰度图像或彩色图像均可)每个像素值进行二进制“与”操作,1&1=1,1&0=0,0&1=0,0&0=0。
bitwise_or是对二进制数据进行“或”操作,即对图像(灰度图像或彩色图像均可)每个像素值进行二进制“或”操作,1|1=1,1|0=0,0|1=0,0|0=0。
bitwise_xor是对二进制数据进行“异或”操作,即对图像(灰度图像或彩色图像均可)每个像素值进行二进制“异或”操作,1^1=0,1^0=1,0^1=1,0^0=0。
bitwise_not是对二进制数据进行“非”操作,即对图像(灰度图像或彩色图像均可)每个像素值进行二进制“非”操作,~1=0,~0=1。
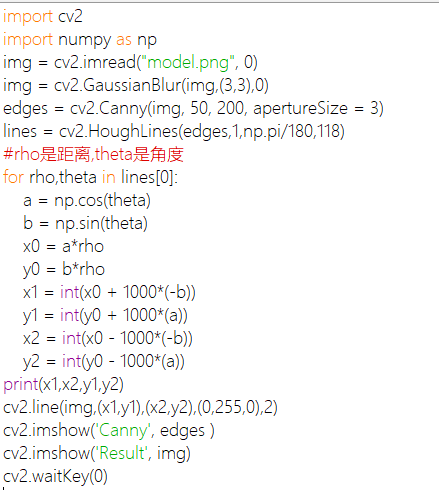
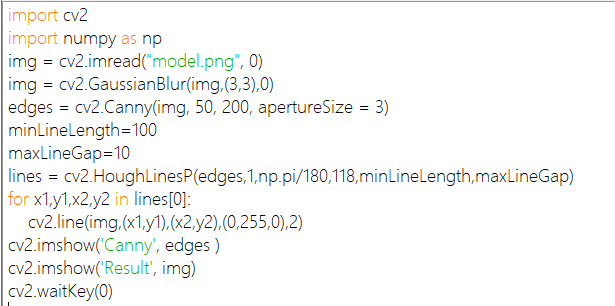
Hough直线变换
cv2.HoughLines(),返回值就是距离和角度。这个函数的第一个参数是一个二值化图像。第二个和第三个值代表距离和角度的精确度。第四个参数是阈值,只有累加其中的值高于阈值时才被认为是一条直线。
cv2.HoughLinesP():比上面多两个参数,minLineLength和MaxLineGap。比较简单
minLineLength:线的最短长度,比这个短的线都忽略
MaxLineGap:两条线段的最大间断,如果小于此值,这两条直线被看成一条直线
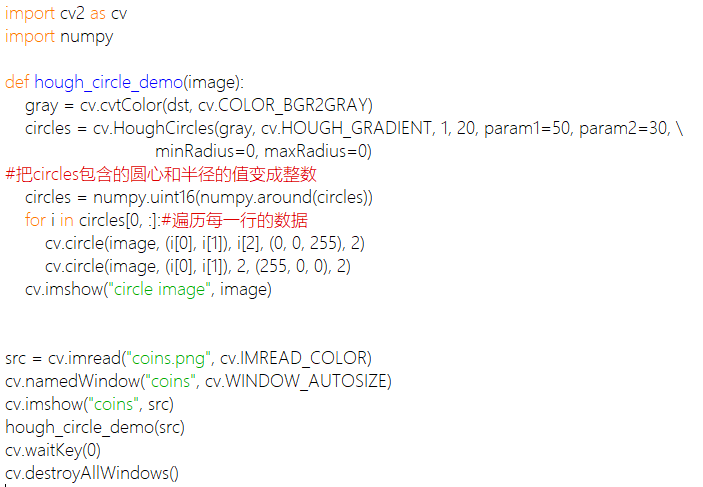
Hough圆环变换:
HoughCircles(image, method, dp, minDist[, circles[, param1[, param2[, minRadius[, maxRadius]]]]])
image参数表示8位单通道灰度输入图像矩阵。
method参数表示圆检测方法,目前唯一实现的方法是HOUGH_GRADIENT。
dp参数表示累加器与原始图像相比的分辨率的反比参数。例如,如果dp = 1,则累加器具有与输入图像相同的分辨率。如果dp=2,累加器分辨率是元素图像的一半,宽度和高度也缩减为原来的一半。
minDist参数表示检测到的两个圆心之间的最小距离。如果参数太小,除了真实的一个圆圈之外,可能错误地检测到多个相邻的圆圈。如果太大,可能会遗漏一些圆圈。
circles参数表示检测到的圆的输出向量,向量内第一个元素是圆的横坐标,第二个是纵坐标,第三个是半径大小。
param1参数表示Canny边缘检测的高阈值,低阈值会被自动置为高阈值的一半。
param2参数表示圆心检测的累加阈值,参数值越小,可以检测越多的假圆圈,但返回的是与较大累加器值对应的圆圈。
minRadius参数表示检测到的圆的最小半径。
maxRadius参数表示检测到的圆的最大半径